

The STM32MP25 processor provides a Digital Camera Memory Interface Pixel Processor (DCMIPP) sourced from a MIPI CSI-2 host controller.
Available camera interfaces
On the ConnectCore MP25 Development Kit:
-
MIPI CSI-2 camera port is available on a 22-pin FFC connector (two data lanes).
Camera connection
The BSP includes support for:
-
ST B-CAMS-IMX MIPI CSI-2 camera (Sony IMX335 sensor)
Connect ST B-CAMS-IMX camera
|
Ensure that the correct cable is used and properly oriented when connecting the MIPI camera to the ConnectCore MP25 Development Kit. Incorrect cable selection or improper orientation may cause permanent damage to the camera. |
For ConnectCore MP25 Development Kit, use a 22 pin, 0.5mm pitch FFC cable with contacts on top on one side, bottom on the other. Pin 1 of the ConnectCore MP25 Development Kit connector aligns with pin 1 of the camera connector.

Kernel configuration
You can manage the camera driver support and Video4Linux (V4L2) capture driver through the following kernel configuration options:
-
STM32 Digital Camera Memory Interface (DCMI) support (
CONFIG_VIDEO_STM32_DCMI) -
STM32 Digital Camera Memory Interface Pixel Processor (DCMIPP) support (
CONFIG_VIDEO_STM32_DCMIPP) -
STM32 Camera Serial Interface (CSI) support (
CONFIG_VIDEO_STM32_CSI) -
Sony IMX335 sensor support (
CONFIG_VIDEO_IMX335)
These options are enabled as modules and built-in on the default ConnectCore MP25 kernel configuration file.
Kernel driver
The drivers for the camera are located at:
| File | Description |
|---|---|
STM32 Digital Camera Memory Interface (DCMI) driver |
|
STM32 Digital Camera Memory Interface Pixel Processor (DCMIPP) driver |
|
STM32 Camera Serial Interface (CSI) support |
|
Sony IMX335 sensor driver |
Device tree bindings and customization
Common bindings for video receiver and transmitter interfaces are described at Documentation/devicetree/bindings/media/video-interfaces.yaml.
The device tree must contain entries for:
-
The V4L2 capture interface
-
The camera sensor
V4L2 capture interface (DCMIPP)
&csi {
vdd-supply = <&scmi_vddcore>;
vdda18-supply = <&scmi_v1v8>;
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
csi_sink: endpoint {
remote-endpoint = <&imx335_ep>;
data-lanes = <0 1>;
bus-type = <4>;
};
};
port@1 {
reg = <1>;
csi_source: endpoint {
remote-endpoint = <&dcmipp_0>;
};
};
};
};
&dcmipp {
status = "okay";
port {
dcmipp_0: endpoint {
remote-endpoint = <&csi_source>;
bus-type = <4>;
};
};
};Sony IMX335 camera sensor (I2C1 slave)
&i2c1 {
...
imx335: imx335@1a {
compatible = "sony,imx335";
reg = <0x1a>;
clocks = <&clk_ext_camera>;
reset-gpios = <&gpiog 7 (GPIO_ACTIVE_HIGH | GPIO_PUSH_PULL)>;
powerdown-gpios = <&gpiof 3 (GPIO_ACTIVE_HIGH | GPIO_PUSH_PULL)>;
status = "okay";
port {
imx335_ep: endpoint {
remote-endpoint = <&csi_sink>;
clock-lanes = <0>;
data-lanes = <1 2>;
link-frequencies = /bits/ 64 <594000000>;
};
};
};
...
};Using the camera
Identify the camera capture devices
Camera configuration and operation is divided between several interconnected subdevices, called entities, sharing video data.
You can use the media-ctl tool to obtain the full camera subsystem topology, a list of subdevices, the connections between them, and some additional postprocessing operations that can be performed on the fly such as cropping or downscaling:
# media-ctl -d platform:48030000.dcmipp -p
Media controller API version 6.6.48
Media device information
------------------------
driver dcmipp
model DCMIPP MDEV
serial
bus info platform:48030000.dcmipp
hw revision 0x30
driver version 6.6.48
Device topology
- entity 1: dcmipp_input (4 pads, 5 links, 0 routes)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev0
pad0: Sink
[stream:0 fmt:SRGGB10_1X10/2592x1940 field:none colorspace:raw xfer:none]
<- "dcmipp_tpg":0 []
<- "48020000.csi":1 [ENABLED]
pad1: Source
[stream:0 fmt:SRGGB10_1X10/2592x1940 field:none colorspace:raw xfer:none]
-> "dcmipp_dump_postproc":0 []
pad2: Source
[stream:0 fmt:SRGGB10_1X10/2592x1940 field:none colorspace:rec709]
-> "dcmipp_main_isp":0 [ENABLED]
pad3: Source
[stream:0 fmt:SRGGB10_1X10/2592x1940 field:none colorspace:raw xfer:none]
-> "dcmipp_aux_postproc":0 []
[...]
- entity 18: dcmipp_main_postproc (2 pads, 2 links, 0 routes)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev3
pad0: Sink
[stream:0 fmt:RGB888_1X24/2592x1940@1/30 field:none colorspace:rec709
crop.bounds:(0,0)/2592x1940
crop:(0,0)/2592x1940
compose.bounds:(0,0)/2592x1940
compose:(0,0)/1280x720]
<- "dcmipp_main_isp":1 [ENABLED,IMMUTABLE]
pad1: Source
[stream:0 fmt:RGB888_1X24/1280x720@1/30 field:none colorspace:rec709]
-> "dcmipp_main_capture":0 [ENABLED,IMMUTABLE]
- entity 21: dcmipp_main_capture (1 pad, 1 link)
type Node subtype V4L flags 0
device node name /dev/video3
pad0: Sink
<- "dcmipp_main_postproc":1 [ENABLED,IMMUTABLE]
[...]
- entity 69: imx335 0-001a (1 pad, 1 link, 0 routes)
type V4L2 subdev subtype Sensor flags 0
device node name /dev/v4l-subdev7
pad0: Source
[stream:0 fmt:SRGGB10_1X10/2592x1940 field:none colorspace:raw xfer:none
crop.bounds:(12,12)/2592x1944
crop:(12,12)/2592x1944]
-> "48020000.csi":0 [ENABLED,IMMUTABLE]Alternatively, you can create a dot graph using the same tool to have a visual representation of the whole camera subsystem:
# media-ctl -d platform:48030000.dcmipp --print-dot > graph.dotUse your host PC to convert the graph.dot file to a PNG image:
$ dot -Tpng -Nfontname=Roboto -Nfontsize=10 -Efontname=Roboto -Efontsize=10 graph.dot > graph.png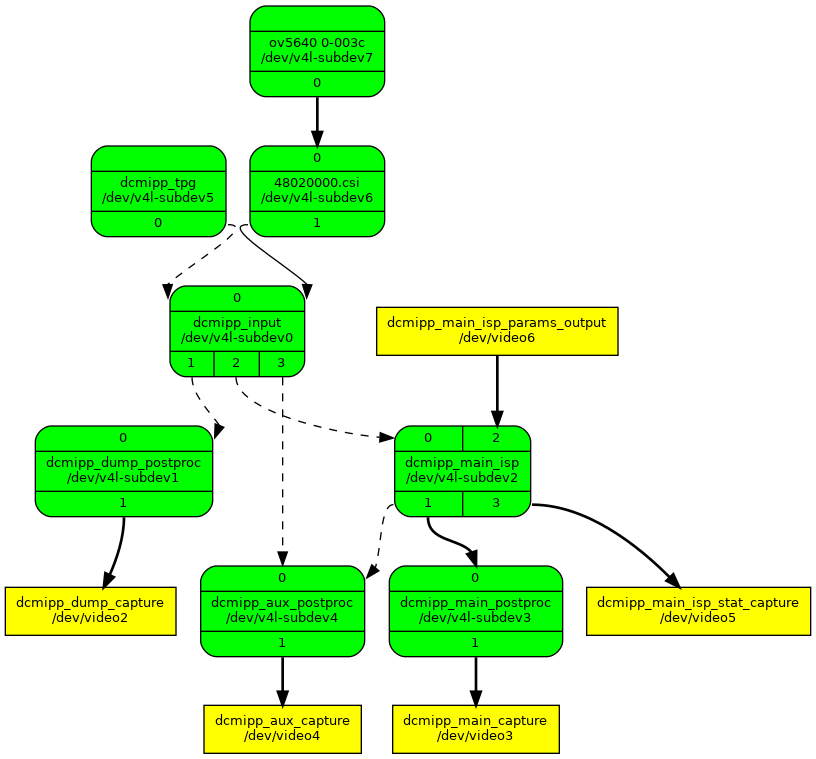
This graph, generated by the media-ctl tool, shows the different video pipes the data can flow through from the camera sensor on the top (source) to the Linux video devices on the bottom (sink).
The camera subsystem creates four video devices, each for a different purpose:
-
/dev/video2is the capture device for the dump pipe. Through the dump pipe, you can read unprocessed video data. -
/dev/video3is the capture device for the main pipe. The main pipe contains most of the processing capabilities of the system, such as scaling, frame skipping, de-Bayering, image correction, color conversion, etc. -
/dev/video4is the capture device for the auxiliary pipe. This pipe can perform some limited processing, like scaling and color conversion. -
/dev/video5is the capture device for statistical data about the image. -
/dev/video6is the input device for injecting ISP block configuration.
Preview a camera image using gstreamer
To get a camera preview:
-
Configure all the nodes in the main pipe for the desired resolution and format (in this example, raw video at 1280x720):
# Reset all media links # media-ctl -r # Establish links between media entities # media-ctl -d platform:48030000.dcmipp -l '"48020000.csi":1->"dcmipp_input":0[1]' # media-ctl -d platform:48030000.dcmipp -l "'dcmipp_input':2->'dcmipp_main_isp':0[1]" # Configure media formats for each pipeline component # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'imx335 0-001a':0[fmt:SRGGB10_1X10/2592x1940]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'48020000.csi':1[fmt:SRGGB10_1X10/2592x1940]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'dcmipp_input':2[fmt:SRGGB10_1X10/2592x1940 field:none]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'dcmipp_main_isp':1[fmt:RGB888_1X24/2592x1940 field:none]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'dcmipp_main_postproc':0[compose:(0,0)/1280x720]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'dcmipp_main_postproc':1[fmt:RGB888_1X24/1280x720]" -
Use gstreamer to capture from videosink
/dev/video3(which corresponds to "dcmipp_main_capture") using the selected video format and redirect it to your display:# Identify the video capture node # export main_capture_dev=$(media-ctl -d "platform:48030000.dcmipp" -e "dcmipp_main_capture") # Start the camera preview using GStreamer # gst-launch-1.0 v4l2src device=$main_capture_dev ! video/x-raw, format=RGB16, width=1280,height=720, framerate=30/1 ! queue ! autovideosink
| At this point, you may notice that the preview image appears quite dark. The following section describes how you can adjust the image. |
Adjust the image using DCMIPP Image Signal Processor (ISP)
You can use a command line utility such as the DCMIPP ISP Control application to adjust image parameters like contrast and ambient light:
# /usr/local/demo/bin/dcmipp-isp-ctrl
/usr/local/demo/bin/dcmipp-isp-ctrl [options]
DCMIPP ISP Control application
-g, --gain Update the Sensor Gain and Exposure (AutoExposure)
-c, --contrast TYPE Set the contrast
TYPE 0 : None
1 : 50%
2 : 200%
3 : Dynamic
-i, --illuminant TYPE Apply settings (black level, color conv, exposure) for a specific illuminant
TYPE 0 : D50 (daylight)
1 : TL84 (fluo lamp)
-s, --stat Read the stat
-S, --STAT Read the stat continuously
--help Display usage
-v Verbose output
# While the video capture is active, execute the following example command to adjust the image:
# /usr/local/demo/bin/dcmipp-isp-ctrl -i0 -c3 -gThe image correction parameters persist across captures, so you don’t need to reapply the changes each time.
See [{XREF_yocto-x-linux-isp_r}] for information on how to use the STMicroelectronics X-LINUX-ISP software package in Digi Embedded Yocto. For a deeper understanding of image correction and advanced configuration, refer to the STMicroelectronics wiki article "How to use the DCMIPP ISP".
Take a picture with the camera using gstreamer
To take a picture:
-
Configure all the nodes in the main pipe for the desired resolution and format (in this example, raw video at 1280x720). Ensure the selected format is supported by the jpegenc plugin of gstreamer:
# Reset all media links # media-ctl -r # Establish links between media entities # media-ctl -d platform:48030000.dcmipp -l '"48020000.csi":1->"dcmipp_input":0[1]' # media-ctl -d platform:48030000.dcmipp -l "'dcmipp_input':2->'dcmipp_main_isp':0[1]" # Configure media formats for each pipeline component # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'imx335 0-001a':0[fmt:SRGGB10_1X10/2592x1940]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'48020000.csi':1[fmt:SRGGB10_1X10/2592x1940]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'dcmipp_input':2[fmt:SRGGB10_1X10/2592x1940 field:none]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'dcmipp_main_isp':1[fmt:RGB888_1X24/2592x1940 field:none]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'dcmipp_main_postproc':0[compose:(0,0)/1280x720]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'dcmipp_main_postproc':1[fmt:YUV8_1X24/1280x720]" -
Use gstreamer to capture from videosink
/dev/video3(which corresponds to "dcmipp_main_capture") using the selected video format and encode it as a JPEG picture addingjpegencto the gstreamer pipe:# gst-launch-1.0 v4l2src device=/dev/video3 num-buffers=1 ! 'video/x-raw, format=YUY2, width=1280, height=720, framerate=(fraction)30/1' ! jpegenc ! filesink location=grab-1280x720.jpeg -
Display the captured image:
# weston-image grab-1280x720.jpeg
Record a video with the camera using gstreamer
To record a video:
-
Configure the camera sensor,
stm32_csi2hostanddcmipp_main_ispnodes for the desired resolution and format (in this example, raw video at 1280x720). -
Downscale the frame size using the
dcmipp_main_postprocnode to avoid a penalization in frame rate produced by video processing latency (in this example, to 1280x720). Ensure the selected format is supported by the avimux plugin of gstreamer:# Reset all media links # media-ctl -r # Establish links between media entities # media-ctl -d platform:48030000.dcmipp -l '"48020000.csi":1->"dcmipp_input":0[1]' # media-ctl -d platform:48030000.dcmipp -l "'dcmipp_input':2->'dcmipp_main_isp':0[1]" # Configure media formats for each pipeline component # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'imx335 0-001a':0[fmt:SRGGB10_1X10/2592x1940]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'48020000.csi':1[fmt:SRGGB10_1X10/2592x1940]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'dcmipp_input':2[fmt:SRGGB10_1X10/2592x1940 field:none]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'dcmipp_main_isp':1[fmt:RGB888_1X24/2592x1940 field:none]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'dcmipp_main_postproc':0[compose:(0,0)/1280x720]" # media-ctl -d platform:48030000.dcmipp --set-v4l2 "'dcmipp_main_postproc':1[fmt:YUV8_1X24/1280x720]" -
Use gstreamer to capture several frames from videosink
/dev/video3using the selected video format and encode it as an AVI video addingavimuxto the gstreamer pipe (in this example, capture 150 frames at 30 fps for a 5 second video):# gst-launch-1.0 v4l2src device=/dev/video3 num-buffers=150 ! 'video/x-raw, format=YUY2, width=1280, height=720, framerate=(fraction)30/1' ! avimux ! filesink location=output.avi -
Play back the recorded video:
# gst-play-1.0 output.avi
Advanced camera configurations
List allowed configurations for each subdevice
To capture video data from the camera, you must configure every subdevice in the pipe from top to bottom to manage the video data using certain format and frame size. Some subdevices are able to convert the video format on the fly and therefore use a different format on their input than on their output. You can rely on the graph to understand which subdevice should be used for each element of the pipe, and which pad corresponds to their input or output.
For example, list the video output format of the first node of the graph (at the top), /dev/v4l-subdev7, which corresponds to the Sony IMX335 camera sensor:
# v4l2-ctl -d /dev/v4l-subdev7 --list-subdev-mbus-codes 0
ioctl: VIDIOC_SUBDEV_ENUM_MBUS_CODE (pad=0,stream=0)
0x3012: MEDIA_BUS_FMT_SRGGB12_1X12
0x300f: MEDIA_BUS_FMT_SRGGB10_1X10Select one, for example MEDIA_BUS_FMT_SRGGB10_1X10, and list the available frame sizes for that format:
# v4l2-ctl -d /dev/v4l-subdev7 --list-subdev-framesizes pad=0,code=0x300f
ioctl: VIDIOC_SUBDEV_ENUM_FRAME_SIZE (pad=0,stream=0)
Size Range: 2592x1940 - 2592x1940
Size Range: 2592x1940 - 2592x1940
Size Range: 2592x1940 - 2592x1940You can list the available format for the rest of the subdevices using similar commands.
For example, you can see the /dev/v4l-subdev2 node, which corresponds to the main image processor, accepts many possible video formats on its input (pad 0) but is only capable of streaming on two 24-bit video raw formats on its output (pad 1):
# v4l2-ctl -d /dev/v4l-subdev2 --list-subdev-mbus-codes 0
ioctl: VIDIOC_SUBDEV_ENUM_MBUS_CODE (pad=0,stream=0)
0x1008: MEDIA_BUS_FMT_RGB565_2X8_LE
0x1017: MEDIA_BUS_FMT_RGB565_1X16
0x101c: MEDIA_BUS_FMT_RGB888_3X8
0x100a: MEDIA_BUS_FMT_RGB888_1X24
0x2008: MEDIA_BUS_FMT_YUYV8_2X8
0x200f: MEDIA_BUS_FMT_UYVY8_1X16
0x2001: MEDIA_BUS_FMT_Y8_1X8
0x200a: MEDIA_BUS_FMT_Y10_1X10
0x2013: MEDIA_BUS_FMT_Y12_1X12
0x202d: MEDIA_BUS_FMT_Y14_1X14
0x3001: MEDIA_BUS_FMT_SBGGR8_1X8
0x3013: MEDIA_BUS_FMT_SGBRG8_1X8
0x3002: MEDIA_BUS_FMT_SGRBG8_1X8
0x3014: MEDIA_BUS_FMT_SRGGB8_1X8
0x3007: MEDIA_BUS_FMT_SBGGR10_1X10
0x300e: MEDIA_BUS_FMT_SGBRG10_1X10
0x300a: MEDIA_BUS_FMT_SGRBG10_1X10
0x300f: MEDIA_BUS_FMT_SRGGB10_1X10
0x3008: MEDIA_BUS_FMT_SBGGR12_1X12
0x3010: MEDIA_BUS_FMT_SGBRG12_1X12
0x3011: MEDIA_BUS_FMT_SGRBG12_1X12
0x3012: MEDIA_BUS_FMT_SRGGB12_1X12
0x3019: MEDIA_BUS_FMT_SBGGR14_1X14
0x301a: MEDIA_BUS_FMT_SGBRG14_1X14
0x301b: MEDIA_BUS_FMT_SGRBG14_1X14
0x301c: MEDIA_BUS_FMT_SRGGB14_1X14
0x301d: MEDIA_BUS_FMT_SBGGR16_1X16
0x301e: MEDIA_BUS_FMT_SGBRG16_1X16
0x301f: MEDIA_BUS_FMT_SGRBG16_1X16
0x3020: MEDIA_BUS_FMT_SRGGB16_1X16
# v4l2-ctl -d /dev/v4l-subdev2 --list-subdev-mbus-codes 1
ioctl: VIDIOC_SUBDEV_ENUM_MBUS_CODE (pad=1,stream=0)
0x100a: MEDIA_BUS_FMT_RGB888_1X24
0x2025: MEDIA_BUS_FMT_YUV8_1X24Set configurations for a subdevice
You can use the media-ctl tool to set configurations for any media entity in the graph:
# media-ctl -d platform:48030000.dcmipp --set-v4l2 "'<entity-name>':<pad>[<settings>]" -vConfigurable settings include:
-
Video format:
fmt:<format-code>/<frame-size> -
Video field:
field:<field-name> -
Video colorspace:
colorspace:<colorspace-name> -
Crop processing:
crop:(<left>,<top>)/<frame-size> -
Scale processing:
compose:(<left>,<top>)/<frame-size>
For example, to configure the camera sensor (which is associated with the imx335 0-001a media entity in the graph) to stream video with MEDIA_BUS_FMT_SRGGB10_1X10 format and 2592x1940 frame size, you must set the media entity output pad (0) fmt property with the following command:
# media-ctl -d platform:48030000.dcmipp --set-v4l2 "'imx335 0-001a':0[fmt:SRGGB10_1X10/2592x1940]" -vIf, for example, later down the pipe, you want to downscale the video to a 1280x720 frame size, configure the dcmipp_main_postproc media entity input pad (0) to perform a compose operation to that size with the following command:
# media-ctl -d platform:48030000.dcmipp --set-v4l2 "'dcmipp_main_postproc':0[compose:(0,0)/1280x720]" -vGet and set additional controls
Some video subdevices have additional controls you can set.
Use the following command to get the list of available controls:
# v4l2-ctl -d <V4L2 subdevice> -LUse the following command to set a control with a new value:
# v4l2-ctl -d <V4L2 subdevice> --set-ctrl <control-name>=<control-value>For example, list the available controls of subdevice /dev/v4l-subdev7, which corresponds to the Sony IMX335 camera sensor:
# v4l2-ctl -d /dev/v4l-subdev7 -L
User Controls
exposure 0x00980911 (int) : min=1 max=4491 step=1 default=1608 value=2808
Image Source Controls
vertical_blanking 0x009e0901 (int) : min=2560 max=133060 step=1 default=2560 value=2560
horizontal_blanking 0x009e0902 (int) : min=342 max=342 step=1 default=342 value=342 flags=read-only
analogue_gain 0x009e0903 (int) : min=0 max=240 step=1 default=0 value=20
Image Processing Controls
link_frequency 0x009f0901 (intmenu): min=0 max=0 default=0 value=0 (594000000 0x2367b880) flags=read-only
0: 594000000 (0x2367b880)
pixel_rate 0x009f0902 (int64) : min=396000000 max=396000000 step=1 default=396000000 value=396000000 flags=read-onlyConfigure, for example, an horizontal flip of the image in the camera sensor. This is performed by the camera sensor itself and does not require later postprocessing:
# v4l2-ctl -d /dev/v4l-subdev7 --set-ctrl horizontal_flip=1List allowed formats for each video device
Run the following v4l2-ctl command to get the available video formats of the dump, main and aux video devices, which you will later use to capture the frames using gst-launch-1.0 tool:
# v4l2-ctl -d /dev/video2 --list-formats
ioctl: VIDIOC_ENUM_FMT
Type: Video Capture
[0]: 'RGBP' (16-bit RGB 5-6-5)
[1]: 'RGB3' (24-bit RGB 8-8-8)
[2]: 'YUYV' (YUYV 4:2:2)
[3]: 'YVYU' (YVYU 4:2:2)
[4]: 'UYVY' (UYVY 4:2:2)
[5]: 'VYUY' (VYUY 4:2:2)
[6]: 'GREY' (8-bit Greyscale)
[7]: 'Y10 ' (10-bit Greyscale)
[8]: 'Y12 ' (12-bit Greyscale)
[9]: 'Y14 ' (14-bit Greyscale)
[10]: 'BA81' (8-bit Bayer BGBG/GRGR)
[11]: 'GBRG' (8-bit Bayer GBGB/RGRG)
[12]: 'GRBG' (8-bit Bayer GRGR/BGBG)
[13]: 'RGGB' (8-bit Bayer RGRG/GBGB)
[14]: 'BG10' (10-bit Bayer BGBG/GRGR)
[15]: 'GB10' (10-bit Bayer GBGB/RGRG)
[16]: 'BA10' (10-bit Bayer GRGR/BGBG)
[17]: 'RG10' (10-bit Bayer RGRG/GBGB)
[18]: 'BG12' (12-bit Bayer BGBG/GRGR)
[19]: 'GB12' (12-bit Bayer GBGB/RGRG)
[20]: 'BA12' (12-bit Bayer GRGR/BGBG)
[21]: 'RG12' (12-bit Bayer RGRG/GBGB)
[22]: 'BG14' (14-bit Bayer BGBG/GRGR)
[23]: 'GB14' (14-bit Bayer GBGB/RGRG)
[24]: 'GR14' (14-bit Bayer GRGR/BGBG)
[25]: 'RG14' (14-bit Bayer RGRG/GBGB)
[26]: 'JPEG' (JFIF JPEG, compressed)
# v4l2-ctl -d /dev/video3 --list-formats
ioctl: VIDIOC_ENUM_FMT
Type: Video Capture
[0]: 'RGBP' (16-bit RGB 5-6-5)
[1]: 'YUYV' (YUYV 4:2:2)
[2]: 'YVYU' (YVYU 4:2:2)
[3]: 'UYVY' (UYVY 4:2:2)
[4]: 'VYUY' (VYUY 4:2:2)
[5]: 'GREY' (8-bit Greyscale)
[6]: 'RGB3' (24-bit RGB 8-8-8)
[7]: 'BGR3' (24-bit BGR 8-8-8)
[8]: 'BA24' (32-bit ARGB 8-8-8-8)
[9]: 'AR24' (32-bit BGRA 8-8-8-8)
[10]: 'AB24' (32-bit RGBA 8-8-8-8)
[11]: 'RA24' (32-bit ABGR 8-8-8-8)
[12]: 'NV12' (Y/UV 4:2:0)
[13]: 'NV21' (Y/VU 4:2:0)
[14]: 'NV16' (Y/UV 4:2:2)
[15]: 'NV61' (Y/VU 4:2:2)
[16]: 'YU12' (Planar YUV 4:2:0)
[17]: 'YV12' (Planar YVU 4:2:0)
# v4l2-ctl -d /dev/video4 --list-formats
ioctl: VIDIOC_ENUM_FMT
Type: Video Capture
[0]: 'RGBP' (16-bit RGB 5-6-5)
[1]: 'YUYV' (YUYV 4:2:2)
[2]: 'YVYU' (YVYU 4:2:2)
[3]: 'UYVY' (UYVY 4:2:2)
[4]: 'VYUY' (VYUY 4:2:2)
[5]: 'GREY' (8-bit Greyscale)
[6]: 'RGB3' (24-bit RGB 8-8-8)
[7]: 'BGR3' (24-bit BGR 8-8-8)
[8]: 'BA24' (32-bit ARGB 8-8-8-8)
[9]: 'AR24' (32-bit BGRA 8-8-8-8)
[10]: 'AB24' (32-bit RGBA 8-8-8-8)
[11]: 'RA24' (32-bit ABGR 8-8-8-8)|
These format names are only valid to perform a capture with the
|
